
In the following article we want to show you how to interpret and analyze your sonar images correctly. Many boat anglers decide to use a sonar to find fish and hotspots faster. But the disillusionment comes shortly after the expensive purchase, because the fewest pictures of a fish finder can be interpreted clearly at first sight. As a non-expert one often knows nothing to do with the pictures and travels kilometer after kilometer before the hooks even see the water. The more important it is to educate yourself to find fish faster and have more time for fishing.
“90% of the fish can be found on 10% of the surface of a lake.“
(Carl Lowrance)
The bad thing is that most manufacturers of echosounders do not manage to provide important and above all basic information for interpreting the sonar images. There is raving about frequencies, DownScan, CHIRP or whatever and all sorts of technical details are advertised so that the customer can buy the most expensive model in the best possible way.
And what comes next? Yes, then you often don’t get such good support anymore and with luck you have bought your fish finder from a good dealer. … Now it is your own responsibility to educate yourself … somewhere in forums or groups on social media.
Can we change that? We will probably not be able to directly influence the approach of the manufacturers. But we can show you in this article how even with basic knowledge you can evaluate and interpret your sonar images much better. Because the best fish finder is useless unless you know how to interpret the sonar images.
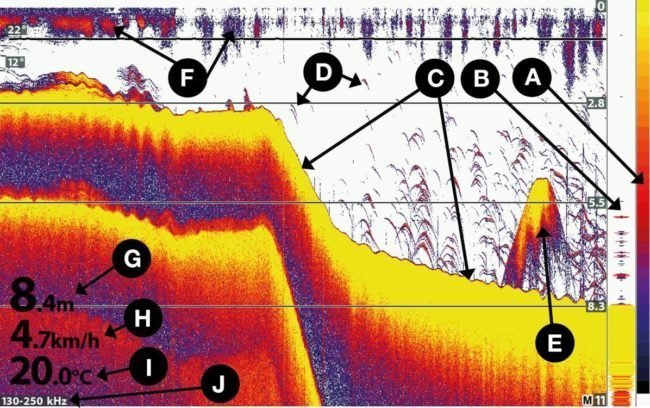
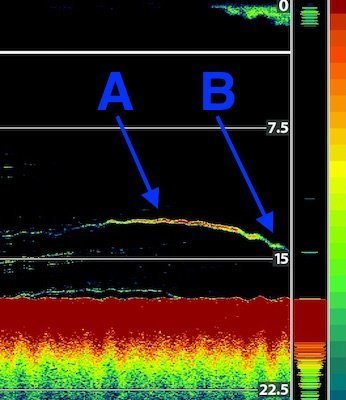
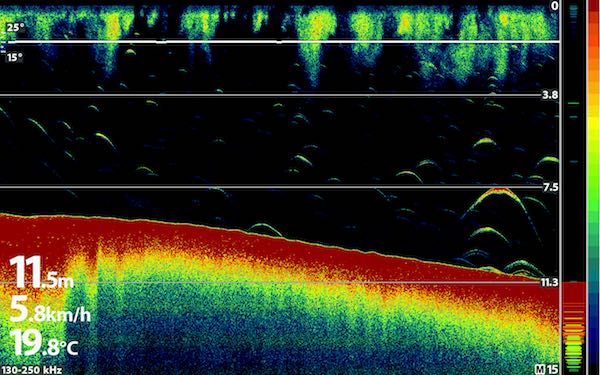
When we look at a sonar image, we recognize differently colored displays:
- Fish arches are sometimes blue, yellow, red or mixed colors, depending on the color palette.
- The bottom line can be thin, or thick and colored yellow, white or blue.
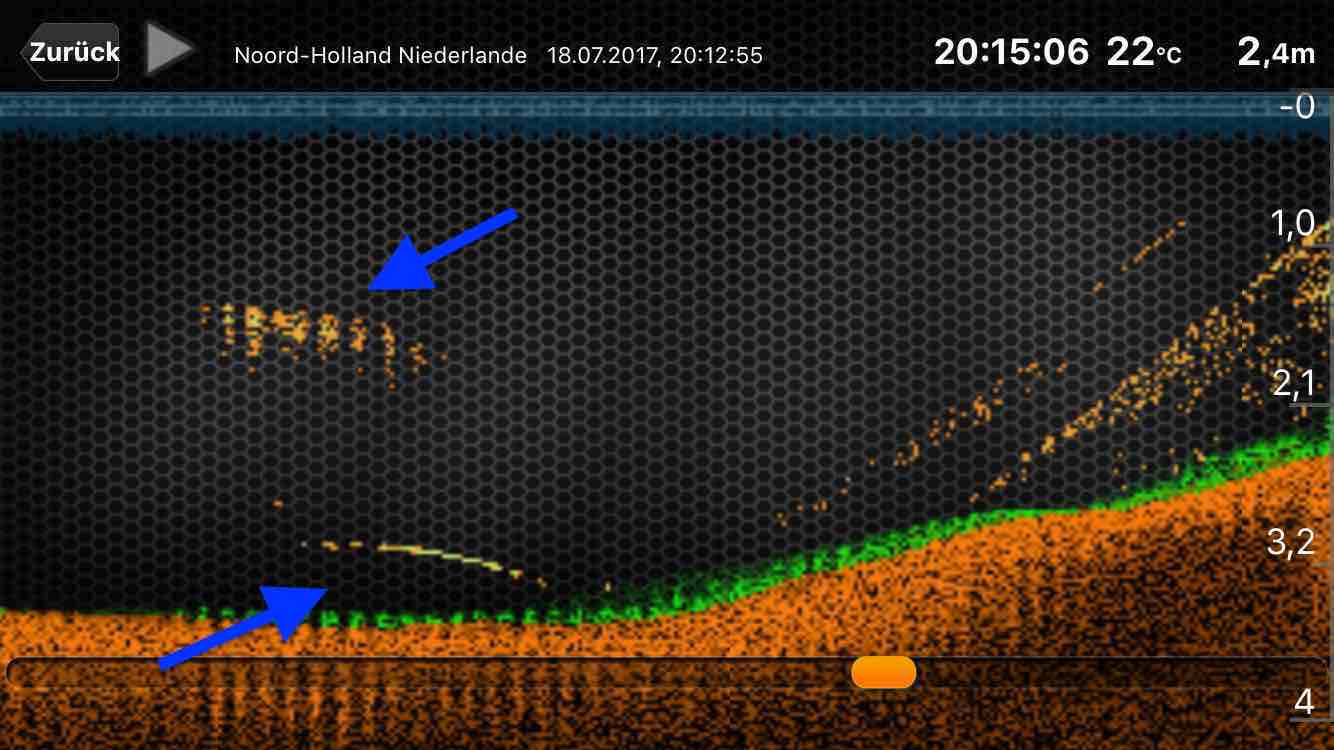
- In this image the color palette (point A) ranges from yellow (the strongest echo) to dark blue (the weakest echo).
A strong echo is almost always generated from the ground. The denser the lake bottom, the stronger the echo and the wider the bottom line. In our example, a very hard bottom is recognizable as a broad yellow bottom line. Point C points to two ground sections. The left arrow points to a thin bottom line (soft bottom) and the right arrow points to a thick bottom line (hard bottom).
With the fish arches there are many differences
Blue Fish Arches: A weak Echo ( Point D). This can indicate that the fish is quite small and therefore no strong echo is produced. The fish can also be at the edge of the sonar cone. This makes the echo much weaker than in the main cone. So even large fish produce only very weak echoes. The meat and bones of fish have almost the same density as the surrounding water. Therefore hardly any echo is generated by them. The swim bladder alone, which is filled with air, is responsible for 90% of the echo strength.
Yellow fish arches: Fish with a large swim bladder usually produce a strong echo and those with a small swim bladder produce a weak one. For this reason, larger perch with two air chambers can often be interpreted as large fish. Whereas for example, a big pike, which has only one air chamber, can be displayed the same size as the much smaller perch. Yellow colored fish arches mean here that the fish produces a strong echo. Either the fish is directly under the transducer and produces a strong echo due to the strong sound wave or the fish is very big, stands optimally to the transducer and can still be found at the outer edge of the transducer cone.
Even a shoal of fish, which we can see in point E, can produce a very strong echo because the sound wave cannot pass through the shoal of prey fish and is fully reflected. In this case, many small air bubbles produce a strong echo.
Red colored fish arches: You can also see them in the image. They are produced by a medium-strong echo and mean small to medium fish in the main cone or larger fish in the lateral areas of the attenuated sonar cone.
Note: Fish finder offer a seemingly unlimited number of adjustment possibilities. This way you catch 80% more fish with 20% of the settings. Learn how to read your fish finder correctly with our ultimate fish finder guide (book) – including the most important fish sonar tips from our 20 years of experience. Or take our video training and become a professional.
At what depth is the fish?
As we have already described in our book “The ultimate guide to fish finders”, it is often a challenge to clearly identify the echo signals. Often fish arches are shown unclearly or too coarsely. But the better the technology, the better the results will be.
Traditional sonar images are not always easy to understand. School of baits, underwater plants and rocks can often only be poorly distinguished. Often one is uncertain what the sonar display really shows. In addition there is the unusual way to read a sonar (from right (current) to left (already past)). That for many fishermen that takes getting used to.
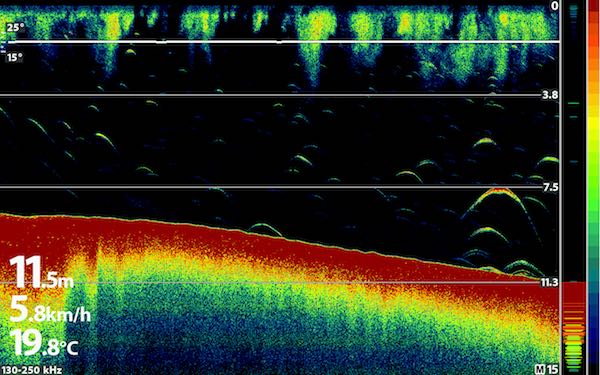
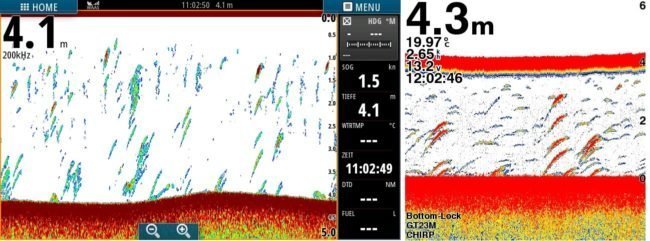
You can pre-empt this guessing game with the latest technology and latest scanning methods. To ensure that the object separation is significantly improved and the resolution is multiplied, you simply use a CHIRP device in combination with a Full-Chirp transducer.
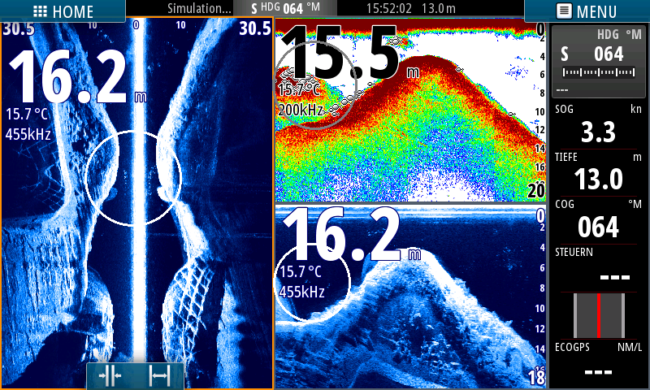
The two sonar images shown above, taken in parallel with a Simrad Go7 at 200 kHz (left) and a Garmin Echomap 52cv with CHIRP transducer (right), suggest how significant the differences can be. The detection rate improves considerably with a real CHIRP transducer, as shown in the image.
Photorealistic images
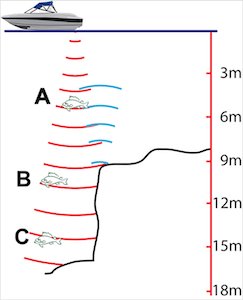
If you see a fish arch on your traditional echosounder, you have already taken a first step. But even if the sonar shows you that there is a big lump under the boat, with a traditional sonar you still don’t know on which direction it is located. This fact alone is not known to many fish finder users.
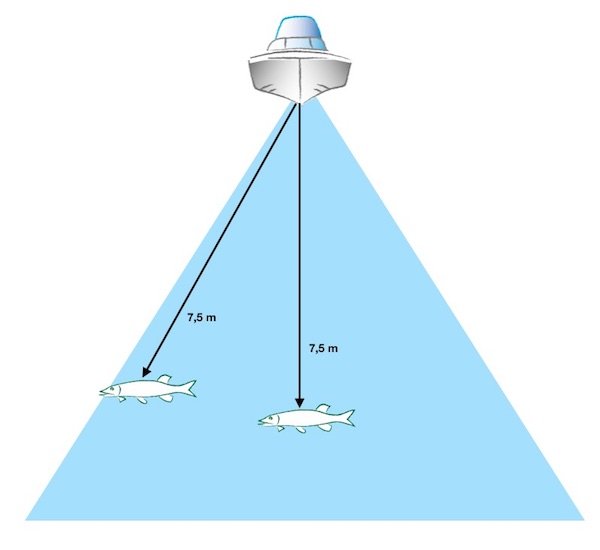
Depending on depth and settings, the fish can be several meters (ft) to the left, right, in front or behind the boat. For example, if a 60° beam angle is used with the fish finder, a fish that appears at 10 meters depth (32 ft) and forms a pretty fish arch could easily be either 10 meters left or 10 meters right of the boat. The sonar cone covers 104 square meters (1,120 sq ft) at a depth of 10 m (32 ft) and a 60° beam angle!
If you are not aware of this fact, you will probably make many unsuccessful casts before you give up frustrated.
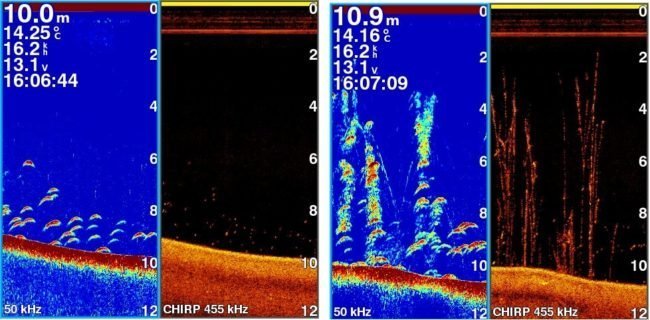
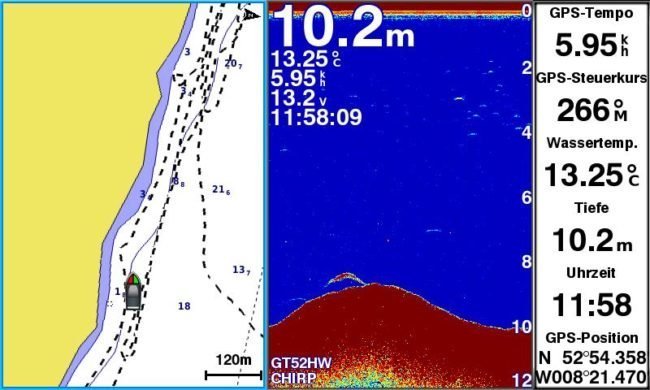
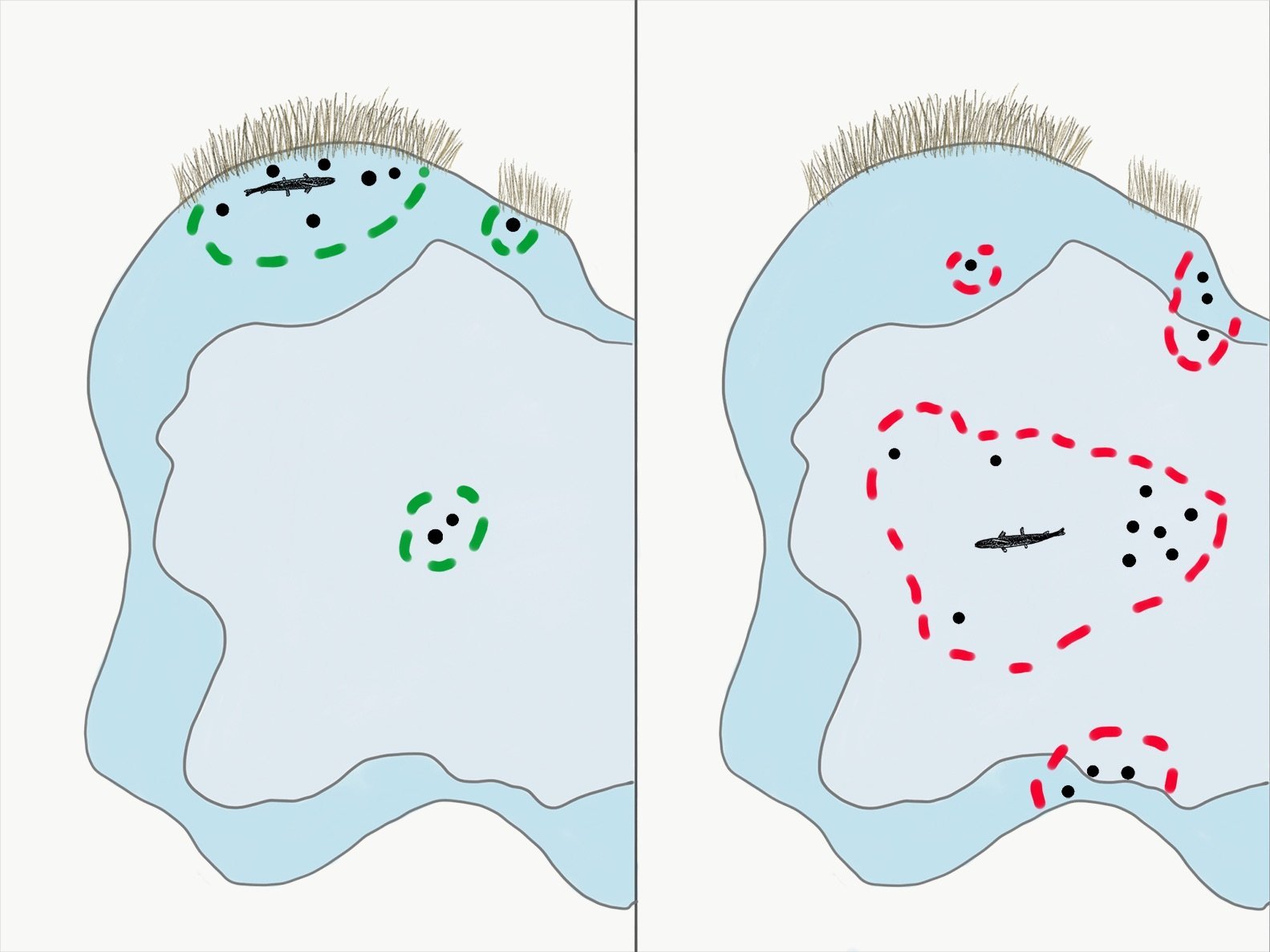
The question of where the fish is can either be restricted by a few strategies. Or use the SideSonar technology in combined with the traditional sonar to answer questions quickly and reliably. For successful pelagic fishing, knowledge of the exact location of the fish under the boat is crucial. In the example shown, I have set the display with fish symbols for better differentiation. (which I never use on the water)
Although this representation is not as reliable, it stands out better against the terrain here than fish arches would do. It should be noted, however, that the scan areas of traditional Sonar and Down- and SideSonar are always different and therefore show different areas under water. The DownSonar only detects a very narrow area on either side of the boat, so fish may appear on the traditional sonar that are not visible in the DownScan until later. In this example, fish are shown on all three images, the SideSonar gives the exact position to the boat. With the right sonar you can mark the fish and navigate exactly with GPS.
Note: Read our detailed fish finder review here.
Note: The Sonar is one of the most expensive pieces of fishing equipment. Only if you know how to use a fish finder correctly and effectively, you can find productive hotspots. With the right knowledge you not only get more out of your equipment and can increase the pure fishing time enormously– inevitably you will you will catch more fish.
This brings us to the end of this article about how to read a fish finder. If you now understand how a fish sonar works, but are still unsure about which sonar to buy for fishing, you can a have a look at the other fish finder reviews in our extensive fish finder test (including the newest models of all important fish finder manufacturers like Garmin, Lowrance, Humminbird or Raymarine) or write us a short message. Have fun on your next angling trip and “Petri Heil” – Jens and Martin.






























Raphaël G
Vladimir M
NICHOLAS JOHN REECY
Henrik
Dr. Manfred Marx
Andreas Witz
AK
Lübbe Wolfgang
Kalksee
Enrico Indelicato
Udo
Josef Weiss
Peter
Holger Just
Matthias Wappler
M. Hermanns
TACKLEFEVER